一、直线竞速车活动场地(参考国际青少年奥林匹克机器人比赛场地)
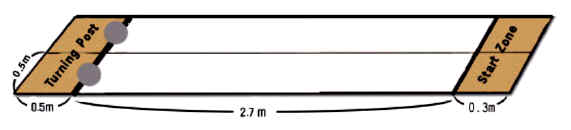
直线竞速比赛的赛场宽50cm,跑道总长350cm,主跑道长270cm,为白色区域;起跑区占30cm,折返区占50cm,起跑区和折返区为橙黄色,起跑线及折返线为3cm宽黑线,四周档板高 8cm,两条跑道中间也设有8cm高的档板。折返线中间设有直径16cm,高10cm的黑色圆柱为折返点。
二、活动规则:
1.机器人从起跑区出发,直线跑至折返点,并绕过折返点后,返回至起跑区,在 最短时间内回到终点。
2.小车在跑道中不许掉零件,否则视为零分。
三、 直线竞速车的制作
制作一辆直线竞速车,要跑得顺、跑得好又能拐弯,车子不能一跑就散了,所以要有非常坚固的结构。而且不能让车子的轱辘擦边,否则会影响车子的速度。想想应如何设计?
四、 学习内容
1.直线竞速车的搭建
(1)设计小车,并完成搭建工作。
(2)观察小车的结构,是否与设想相同?
(3)考虑小车转弯的问题。
2.直线竞速车的程序设计
(1)分析需要小车完成哪些动作,即小车的功能。
(2)认识INVENTOR4的视窗界面。
五、搭建参考
1.我们用两个马达控制车轮

 2. 左图中使用了一个L型的积木,
2. 左图中使用了一个L型的积木,
它的作用是什么?
3.小车轱辘擦边如何解决?
4.想想图中各部分结构的作用?
六、关于光值的设定
我们在每一次进行直线跑之前,要先测定光值。那么,如何来测量光值呢?首先,我们将光电传感器与RCX的1-3端口中任一端口连接,然后按VIEW按钮,通过RCX的窗口观察黑线及黑线外的光值,将两个光值相加之后除以2,即为要测试的光值。
请写下光电传感器在黑线附近所测到的光值:
七、直线竞速比赛
想想看在教室中测得的光值哪儿最高?哪儿最低?数值是多少?
我们先不考虑转弯问题,先编写折返跑程序:
右图中哪一个程序可执行?为什么?
图中有什么不同?如何修改程序?


八、直线竞速车的程序分析
程序下载后,执行程序。我们看到小车到折返点后,车身没有过黑线后就返回。该如何解决呢?写出你的程序修改方案。
小车可以往返跑以后,我们让小车实现转弯跑,想想该如何写程序。你是不是还有其他设想,可以让小车的性能、结构更好?


